“BehavisionPro空间智能MaaS平台以‘Assets-Behavior-Client’三大板块为架构核心,针对当前具身智能领域数据资源匮乏、跨本体适配难度高、场景落地效率慢等难题,通过‘多模态数据筑基+大模型驱动决策+工具化接口支撑高效执行’的组合方案,成功构建起‘世界感知-时序推理-任务执行’的完整能力闭环。”


Assets板块:
多模态数据筑牢产业“燃料库”
“当前机器人普遍面临‘感知不准、决策混乱、执行脱节’困境。”吴邦毅在演讲中直指行业核心矛盾,并表示,BehavisionPro的“Assets-Behavior-Client”架构正是针对目前行业困境的解决方案。
在演讲的核心技术解读环节,吴邦毅重点阐述了平台的数据根基。BehavisionPro平台在Assets板块打造的多模态数据体系,涵盖真机任务数据、百万级3D数据、复杂空间场景数据与3D铰接数据等核心数据,其中真机任务数据通过真实场景下的机器人作业采集,覆盖抓取、按压等核心原子技能,确保数据与实际应用需求高度匹配;百万级3D数据,包含3D模型数据、空间导航数据等,全面塑造机器人的环境感知与自主导航能力;复杂空间场景数据,还原智能服务、智能制造等多样化物理空间,让机器人适应不同场景的环境特征;国内领先规模的3D铰接数据,这类数据赋予3D模型可动关节与精准物理属性(如质量、摩擦力、惯性),不仅能构建“铰接物体知识图谱”,更能大幅缩减Sim2Real差距,机器人可在仿真环境中低成本、高效率完成训练,迁移至现实场景。


Behavior引擎:
大模型驱动“大小脑协同”决策
如果说“Assets”是具身智能的“感知神经”,那么“Behavior”就是其“时序大脑”。Behavision Pro平台在Behavior板块重点打造面向具身智能的行为引擎,通过自研大模型“智者千问”实现CoT思维链拆解与生成式任务规划,使机器人在复杂环境中具备更强的逻辑推演与动态响应能力。
同时,平台在仿真与真实环境中构建任务规划与执行机制,实现从长程规划到短程控制的高效优化。全面强化了机器人的时序推理与决策能力,为具身智能从实验迈向产业落地奠定了坚实基础。

“Client”打通执行闭环:
统一接口实现多形态机器人适配
具身智能的最终价值,在于“落地执行”。针对当前行业中“不同厂商机器人本体构型与软件架构不兼容、跨本体应用难”的痛点,BehavisionPro平台在“Client”板块基于MCP(Model Context Protocol)提供统一的工具化接口,让开发者可便捷接入与调试,轻松实现“仿真与现实的高效协同”。
通过统一接口,BehavisionPro平台能适配多形态机器人,包括人形机器人、双臂机器人、轮式机器人、四足机器人等,覆盖智能制造(如零件分拣)、智能服务(如家庭陪伴)、智能教育(如教学演示)等核心场景。例如,开发者无需为不同机器人重复开发算法,只需通过接口调用平台的“原子技能库”(如通用抓取、按压),即可快速部署复杂任务,大幅降低研发成本与调试周期,同时增强机器人的本体任务执行能力。


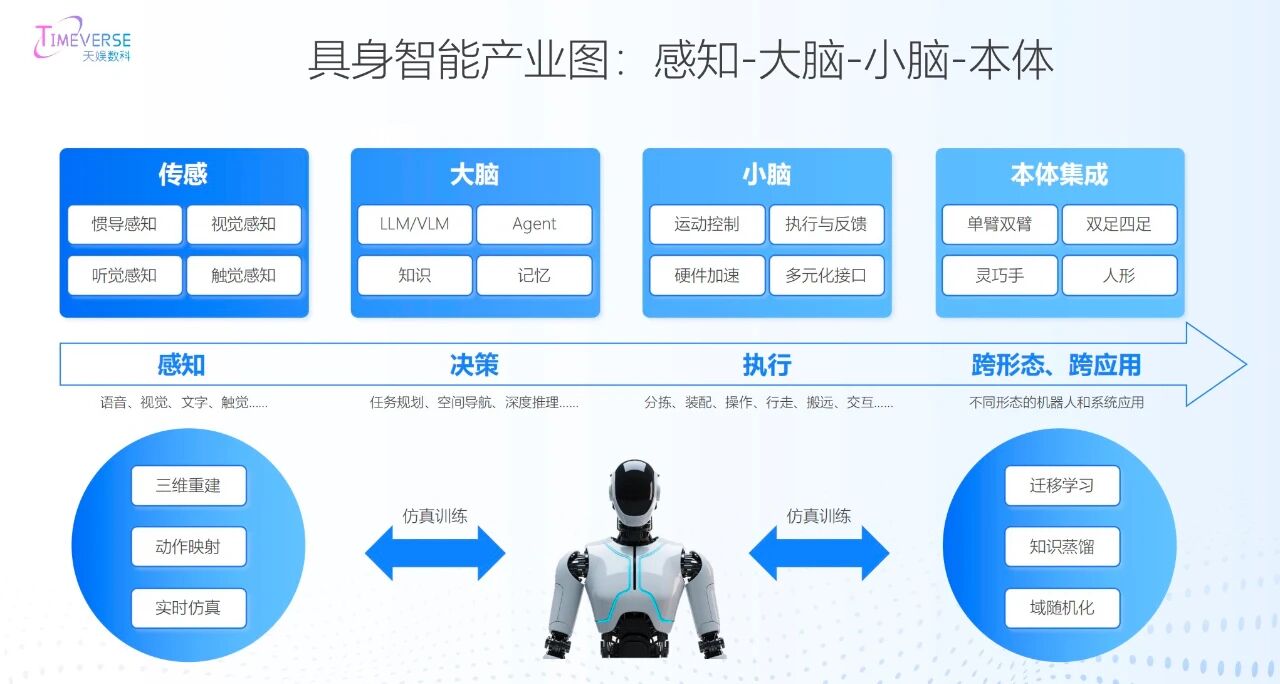
迈向具身智能“安卓时刻”
作为贯通“感知、决策、执行”的一体化智能架构,BehavisionPro的核心优势在于实现了具身智能“大脑”(基于LLM/VLM的决策系统)与“小脑”(运动控制与执行系统)的协同发展,为算法开发重复投入、3D数据匮乏、标准认证不统一、场景测试不足等行业瓶颈提供系统性解决方案。

